

關(guān)于大地坐標(biāo)系四參數(shù)和七參數(shù)的幾點(diǎn)認(rèn)識
我們在日常的測繪當(dāng)中經(jīng)常要用到相關(guān)的參數(shù),四參數(shù)和七參數(shù)更是經(jīng)常提到。以下僅提供本人對大地坐標(biāo)系四參數(shù)和七參數(shù)的幾點(diǎn)認(rèn)識:
系")
參數(shù)的概念
1、兩個不同的二維平面直角坐標(biāo)系之間轉(zhuǎn)換時,通常使用四參數(shù)模型(數(shù)學(xué)方程組)。在該模型中有四個未知參數(shù),即:
(1)兩個坐標(biāo)平移量(△X,△Y),即兩個平面坐標(biāo)系的坐標(biāo)原點(diǎn)之間的坐標(biāo)差值;
(2)平面坐標(biāo)軸的旋轉(zhuǎn)角度A,通過旋轉(zhuǎn)一個角度,可以使兩個坐標(biāo)系的X和Y軸重合在一起。
(3)尺度因子K,即兩個坐標(biāo)系內(nèi)的同一段直線的長度比值,實(shí)現(xiàn)尺度的比例轉(zhuǎn)換。通常K值幾乎等于1.
通常至少需要兩個公共已知點(diǎn),在兩個不同平面直角坐標(biāo)系中的四對XY坐標(biāo)值,才能推算出這四個未知參數(shù),計(jì)算出了這四個參數(shù),就可以通過四參數(shù)方程組,將一個平面直角坐標(biāo)系下一個點(diǎn)的XY坐標(biāo)值轉(zhuǎn)換為另一個平面直角坐標(biāo)系下的XY坐標(biāo)值。
2、兩個不同的三維空間直角坐標(biāo)系之間轉(zhuǎn)換時,通常使用七參數(shù)模型(數(shù)學(xué)方程組),在該模型中有七個未知參數(shù),即:
(1)三個坐標(biāo)平移量(△X,△Y,△Z),即兩個空間坐標(biāo)系的坐標(biāo)原點(diǎn)之間坐標(biāo)差值;
(2)三個坐標(biāo)軸的旋轉(zhuǎn)角度(△α,△β,△γ)),通過按順序旋轉(zhuǎn)三個坐標(biāo)軸指定角度,可以使兩個空間直角坐標(biāo)系的XYZ軸重合在一起。
(3)尺度因子K,即兩個空間坐標(biāo)系內(nèi)的同一段直線的長度比值,實(shí)現(xiàn)尺度的比例轉(zhuǎn)換。通常K值幾乎等于1.
通常至少需要三個公共已知點(diǎn),在兩個不同空間直角坐標(biāo)系中的六對XYZ坐標(biāo)值,才能推算出這七個未知參數(shù),計(jì)算出了這七個參數(shù),就可以通過七參數(shù)方程組,將一個空間直角坐標(biāo)系下一個點(diǎn)的XYZ坐標(biāo)值轉(zhuǎn)換為另一個空間直角坐標(biāo)系下的XYZ坐標(biāo)值。
參數(shù)的使用環(huán)境
1、如果地面兩點(diǎn)的距離小于10KM,我們幾乎可以忽略因采用不同橢球參數(shù)對轉(zhuǎn)換精度的影響,所以,采用四參數(shù)來完成兩種坐標(biāo)系的轉(zhuǎn)換。
2、如果地面上兩點(diǎn)的距離超過了15km,那么我們就必須考慮兩種不同坐標(biāo)系所采用的橢球參數(shù),避免因橢球參數(shù)的差異,導(dǎo)致點(diǎn)位換算后的精度過低,所以就必須采用七參數(shù)來完成兩種坐標(biāo)系的轉(zhuǎn)換。
說得簡單一點(diǎn),七參數(shù)是一種空間直角坐標(biāo)系的轉(zhuǎn)換模型,而四參數(shù)是一種平面直角坐標(biāo)系的轉(zhuǎn)換模型。
目前我們外業(yè)測量采用RTK儀器比較居多,在當(dāng)前的GPS軟件中,也有相應(yīng)的四參數(shù)和七參數(shù)設(shè)置。采用四參數(shù),對于簡單的地形測量其實(shí)沒有必要進(jìn)行高程擬合,即使你用了高程擬合參數(shù)也很難達(dá)到四等水準(zhǔn)測量的精度,即使采用高程擬合參數(shù)后,RTK的高程測量的精度也不能進(jìn)行保證的。我們知道:RTK是通過測量直接獲得的大地高減去高程異常值,來求解正常高的,而采用數(shù)學(xué)擬合法獲得的高程異常值不一定精確,加之不同地方的高程異常值有差異。所以,小范圍測區(qū)沒有必要使用高程擬合參數(shù),而大面積的測區(qū)使用一下盡量讓求解值接近正常高吧。
參數(shù)的求解
1、不同的地方因?yàn)橥队鞍l(fā)現(xiàn)變化,所以參數(shù)也會有不同,可以向當(dāng)?shù)販y繪主管部門獲取相應(yīng)區(qū)域的參數(shù);
2、能夠進(jìn)行參數(shù)求解的軟件:CASS9.1、MAPGIS6.7、GPS內(nèi)置軟件等。
更多相關(guān)
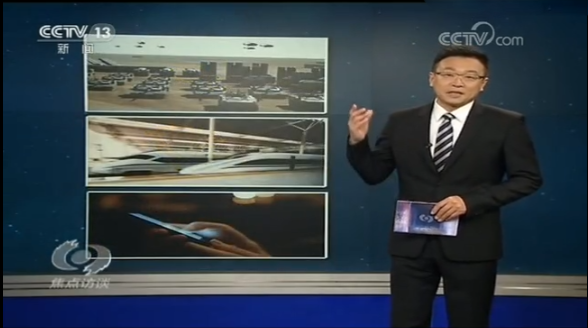
焦點(diǎn)訪談:北斗導(dǎo)航,更廣更精更強(qiáng)
央視網(wǎng)消息(焦點(diǎn)訪談):茫茫夜空,星耀北斗。今年11月19日,星空中又多了兩位中國成員,這就是兩顆北斗三號衛(wèi)星。高大上的北斗衛(wèi)星,其實(shí)很接地氣。比如,在沙場點(diǎn)兵的檢閱場、在風(fēng)馳電掣的動車組上、在應(yīng)...

航測無人機(jī)助力九寨溝災(zāi)區(qū)成功獲取首批震后高分辨率影像
8月8日四川九寨溝7.0級地震發(fā)生后,國家測繪地理信息局統(tǒng)一部署和組織四川測繪地理信息局等單位全力投入應(yīng)急測繪保障服務(wù)工作中。8月9日,國家測繪地理信息局成功獲取首批災(zāi)區(qū)震后高分辨率航空和衛(wèi)星影像...

ZOOM75/ZOOM95全自動馬達(dá)全站儀
中緯測量系統(tǒng)隸屬于海克斯康集團(tuán),中緯測量系統(tǒng)(武漢)有限公司是海克斯康測量技術(shù)集團(tuán)在中國本土投資的獨(dú)資企業(yè),產(chǎn)業(yè)立足中國,產(chǎn)品面向全球。“中緯”公司總部位于“中國·光谷”,是東湖高新技術(shù)...
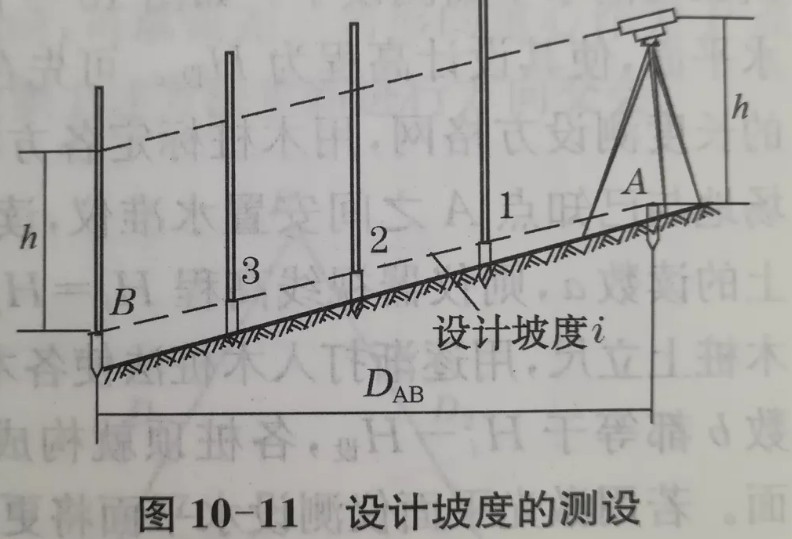
利用水準(zhǔn)儀、經(jīng)緯儀、垂準(zhǔn)儀完成設(shè)計(jì)坡度與鉛垂線的測設(shè)
設(shè)計(jì)坡度的測設(shè) 設(shè)計(jì)坡度的測設(shè)就是根據(jù)一點(diǎn)的高程,在給定方向上連續(xù)測設(shè)一系列坡度樁,使樁頂連線構(gòu)成已知坡度。如圖10-11所示,設(shè)A點(diǎn)高程為HA,AB間水平距離為DAB,試從A點(diǎn)沿AB方向測設(shè)設(shè)...

長江委水文局援疆項(xiàng)目之外業(yè)測量圓滿結(jié)束
10月8日,隨著喀什地區(qū)巴楚縣762111井的最后一組水準(zhǔn)點(diǎn)、井面高、地面高數(shù)據(jù)記錄在案,長江委水文局援疆項(xiàng)目,國家地下水監(jiān)測工程(水利部分)新疆維吾爾自治區(qū)430個地下水監(jiān)測站高程引測與坐標(biāo)測量...

我國六次大規(guī)模的珠峰高程測量
在測繪人的眼中,珠峰的歷史其實(shí)就是一部測繪史。早在1717年,清政府編制的《皇輿全覽圖》中就明確地標(biāo)注了珠穆朗瑪峰的位置。從1852年開始,不同的國家開始對珠峰高程進(jìn)行測量。 1966-1968...

我國北斗三號全球定位系統(tǒng)正式啟動建設(shè)
我國北斗三號全球定位系統(tǒng)正式啟動建設(shè),計(jì)劃今年底將發(fā)射四顆全球組網(wǎng)衛(wèi)星。 目前,全球范圍內(nèi)已經(jīng)有四大衛(wèi)星導(dǎo)航系統(tǒng),除了我國的“北斗”全球?qū)Ш较到y(tǒng)外,還包括美國的全球衛(wèi)星定位系統(tǒng)——GPS,俄...

科力達(dá)三維激光測量系統(tǒng)應(yīng)用實(shí)例
科力達(dá)三維激光移動測量系統(tǒng),可用無人機(jī)或汽車搭載,通過移動測量系統(tǒng)操控軟件實(shí)現(xiàn)點(diǎn)云/影像數(shù)據(jù)采集,連同實(shí)時獲取的姿態(tài)和GNSS信息,經(jīng)過三維激光點(diǎn)云地形地籍成圖軟件處理,實(shí)現(xiàn)災(zāi)害應(yīng)急、農(nóng)業(yè)、測繪、...
 環(huán)球測繪微信
環(huán)球測繪微信